


Ето вече е завършено и окапачено, тези дни ще изкарам нещета на полето и ще направя клип как действат, а те действат повярвайте


Ето вече е завършено и окапачено, тези дни ще изкарам нещета на полето и ще направя клип как действат, а те действат повярвайте
Здравейте момци,
Прехвърлям малко допълнителни обяснения за автопилота, от:
http://modelist.bg/showthread.php?t=...ll=1#post10235
http://modelist.bg/showthread.php?t=...ll=1#post10235
http://modelist.bg/showthread.php?t=...ll=1#post10252
защото малко темата се измести ( без умисъл ) в друг раздел.
Нека четящите тук да ме извинят.
Originally Posted by nickarsow

Николай Арсов - дърт авиомоделист от 1967г.
Ники, не се сърди но искам да ти припомня ,че тази тема я започнахме с цел да помогнем на колегите моделисти сами да изградят система за стабилизация и FPV не да им продаваме такава, да създадем нещо нашо БЪЛГАРСКО и да го популяризираме.
МОЛЯ ТЕ !!!Нека не я комерсиализираме!!!!Но все пак ти си автора, темата е твоя и ако искаш да продължиш своя проект като комерсиялен аз ще се оттегля за да не преча на развитието, естествено ще помагам при нужда
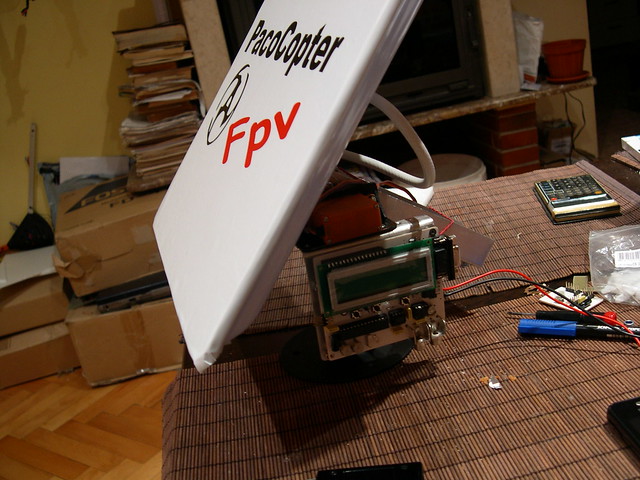
Ето един клип как действа системaта за FPV , връзката между OSD-то и базисната станция е с кабелче което симулира радио връзката която за съжаление в домашни условия не е добре да се ползва ,данните са насложени върху комплексния видео сигнал , декодират се от базисната станция и се индицират на дисплея и, от там се изработва сигнал за управление на сервата за насочване на антената, предвидил съм два режима по максимум сигнал който следя през RSSI-то (за непосветените това е постояно токова съставка на изхода на междиночестотния усилвател даваща представа за силата на входния сигнал на антената на приемника) или по GPS данните който ми дават посока и ъгъл спрямо началното установяване при отпадане за кратко на сигнала системата продължава да следи по подразбиране следвайки треакторията на движение, същевремено се декодират директни данни и се подавт към COM-порта и там може да се следи позицията чрез някой мап тракер.За съжаление няма да мога да демонстрирам последното защото малко преди това се спънах в кабела и вече нямам порт..Ситемата индицира консумацията на ток освен напрежението на двете батерий , нивото на RSSI-то има статистическа обработка на данните като смята моментка консумация и оставащ ток в батерията ,средна скорост, изминат път и прибира модела в къщи. Управлението на режимите става през AUX или друг свободен канал на апаратурата.В моя случай от втора апаратура занимаваща се снасочване и управление на видеото защоъо всичките 8 канала на основната ми апаратура са заети с управление на параметрите на стабилизиращата система, мога да променям настройките по всяка една ос динамичко в полет в зависимост от полетните условия(вятър , термики и тн.)
Последна редакция от ПАЦО; 19.12.2011 на 07:30.
О.К. Няма да я комерсиализираме. Ще пишем само по техническа част.
Николай Арсов - дърт авиомоделист от 1967г.
Така те искам!!! Мъжко момче си!!!Дърти моделисти сме и трябва да си помагаме а и младите да учим на толерантност и взаимопомощ
Момчета , търся да купя ефтин лап-топ втора употреба единственото ми условие е да има читав реален сериен порт, моля помогнете

Считай, че съм те обзавел. Само трябва да сляза до мазата и да видя дали има COM порт. И разбира се да поизтрия от диска това онова.
Росимир Матеев
В момента 1 потребители разглеждат тази тема. (0 регистрирани и 1 гости)






 Цитат
Цитат