


Според мен това опашното серво е бавно . Имам :) такива за друго са ок но за опашка не стават .
Електрониката е толкова важна колкото и производителя :) а можеби и по-важна.

Според мен това опашното серво е бавно . Имам :) такива за друго са ок но за опашка не стават .
Електрониката е толкова важна колкото и производителя :) а можеби и по-важна.

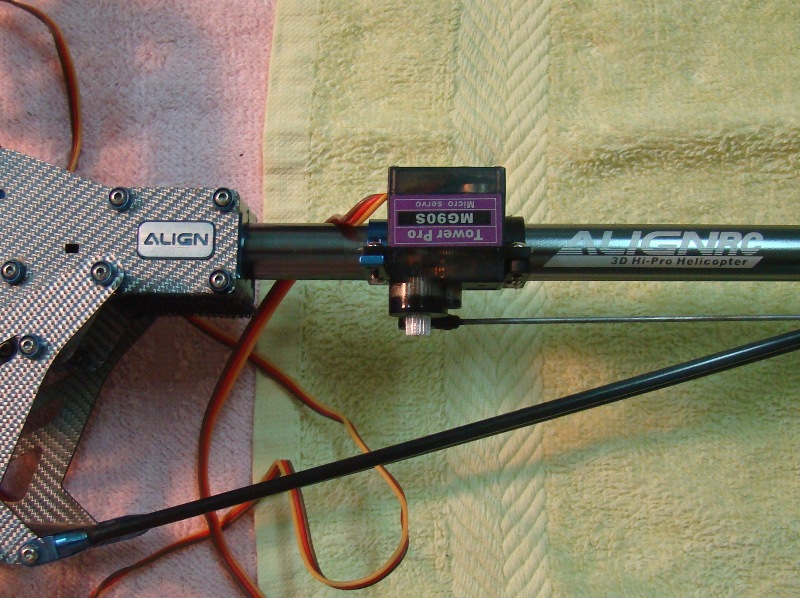
Знам че е така, но за съжаление KDS Flymentor 3D не може да управлява цифрови сервота. Поради тази причина избрах колкото се може по-добро аналогово серво с метални зъбни колела. Дори и да бях сложил цифрово, то пак щеше да бъде управлявано като аналогово (с период между импулсите 20 ms). Това обезмисля неговото поставяне и затова взех такова компромисно решение. Все пак по-важна беше стабилизацията, а не потрепването на опашката с няколко милиметра.
Този хеликоптер е замислен като учебен. Дефакто той може да бъде безопасно вдигнат във въздуга от всеки един новобранец с не повече от 30 секунди опит в летенето. А после с напредването на обучението постепенно чрез USB настройки може да се намалява процента на участие на компютъра и да се увеличава процента на участие на новобранеца. Именно заради това купих точно тази стабилизираща система - защото имаше възможност за плавно регулиране на тези проценти. Като за първи полет на новобранеца му се дават само 10% участие. Другото се прави от бордовия компютър.
Ето го опашното серво:
Последна редакция от Mateev; 29.01.2010 на 01:38.
Росимир Матеев
Смених пластмасовите опашни перки с карбонови и оправих заклинването в механизма (имаше износена месингова втулка и разбит лагер). Тука е мястото да благодаря за неоценимата помощ на Христо Христов от Ловеч, които дефакто откри повредата, поправи я, и после ми настрои главата и сервомашинките.

Последна редакция от Mateev; 29.01.2010 на 01:40.
Росимир Матеев
Ето я базовата електроника:
Използва се 8 каналния приемник RX-2801E на Walkera и 36 амперов спийд контролер на Hextronik. Особенното тука е, че спийд контролера се настройва посредством USB интерфейс и най-важния параметър е Timing Mode или Timing Advance, който се настройва на най-ниското възможно ниво за Outrunner-и с много полюси. При грешна настройка прегрява както спийда, така и мотора.
Последна редакция от Mateev; 28.01.2010 на 23:28.
Росимир Матеев
А ето я и стабилизиращата система:
Състои се от бордови компютър, изнесен датчик с вградени в него 3 жироскопа, камера за следене на терена под хеликоптера, USB преходник с кабел и CD със софтуер за настройка.
Всички са наясно как с 3 жироскопа може да се стабилизира произволен летящ обект. Интересното в тази система е друго - наличието на камера, която гледа терена под летящия обект. Тази камера държи в паметта си два последователни кадъра и на база отместването на единия кадър спрямо другия взема решение за корекция на позицията на хеликоптера. По този начин се гарантира не просто Hovering-a. По-този начин се гарантира заковаването на хеликоптера в една точка дори и тогава, когато има силен страничен вятър.
Ееее, не всичко е чак толкова идеално. В действителност има лек дрейф във всички посоки, който е обусловлен от натрупването на грешка от дискретизация на жироскопите и камерата. Но този дрейф е минимален и мести хеликоптера с не повече от няколко сантиметра в секунда при силен страничен вятър. С такова малко отместване ще се справи дори и новобранец.
Другия недостатък е, че заковаването в една точка работи само когато хеликоптера е сравнително близо до земята (няколко метра) и само тогава, когато под него има контрастен терен (над вода например няма да работи). Това обаче са бели кахъри на фона на всички останали екстри.
Последна редакция от Mateev; 29.01.2010 на 01:34.
Росимир Матеев
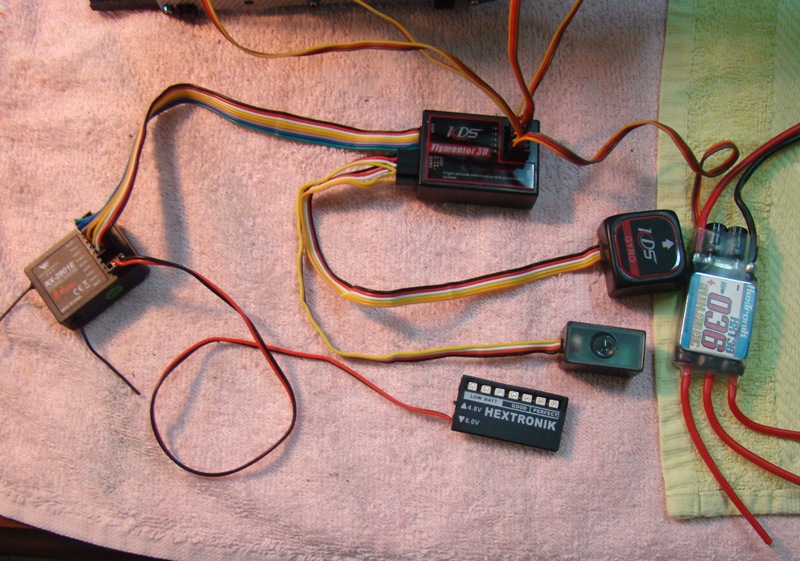
А ето и свързана тестова схема за първи експерименти:
Трябва да си призная, че настройването на хеликоптера и на стабилизиращата система си беше цяло предизвикателство. Загубихме часове наред в четене на инструкцията ред по ред и в гадаене какво точно е искал да каже китаеца с лошия английски.
Освен това параметрите на стабилизиращата система се оказаха доста много на брой и някои от тях така и не разбрахме какво правят. Добре че имаше някакви настройки по Default, иначе щяхме бая да се изприщим.
Най-важните настройки обаче ги разбрахме и ги настроихме както трябва. Тука няма да пиша как точно се настройва глава на хеликоптер. Ще оставя това на Христо Христов, който дефакто ми беше учител през цялото време. От мене бяха познанията по електроника, а от него - по механика и настройки. Заедно успяхме да докараме нещата до един успешен завършек.
Последна редакция от Mateev; 28.01.2010 на 23:57.
Росимир Матеев
Дефакто хеликоптера не се прави в момента. Той отдавна е направен и си лети много добре. Снимките за една такава тема са отдавна подготвени, но не посмях да я отворя в МОДЕЛИСТИКА по понятни за всички причини. Имам и още материали, подготвени за други теми, и смятам в следващите няколко дни да ги публикувам. Приканвам и всички останали да преровят наличните си снимки и да се похвалят с един или друг модел.
Повече по темата утре, че вече ми се доспа.
Последна редакция от Mateev; 29.01.2010 на 01:44.
Росимир Матеев
В момента 1 потребители разглеждат тази тема. (0 регистрирани и 1 гости)

 Цитат
Цитат
